Legacy Motor
Note
Legacy Stage drivers are not recommended and are only provided for backward compatibility. Vidrio is currently unable to test these drivers and therefor cannot guarantee the correct functionality of these drivers.
When available, use a ScanImage 2020 stage driver instead.
The following legacy drivers are available:
Several Zaber stages (New Zaber Driver recommended instead)
Several Thorlabs stages (New Thorlabs Kinesis Driver recommended instead)
ASI MS-2000
Bruker MAMC
Galil DMC4040
Newport XPS
Prior ProScan III
Several PI stages
Software Config
In ScanImage, open the Resource configuration window from the startup dialog or from the Main Controls window under File>Configuration.
From the Resource Configuration window, click the “+” button. Select Motor Controller from the sidebar, and select Legacy Motor. Give it a name and continue.
A window like shown below will be displayed. Below the image is a description of each of the configuration parameters
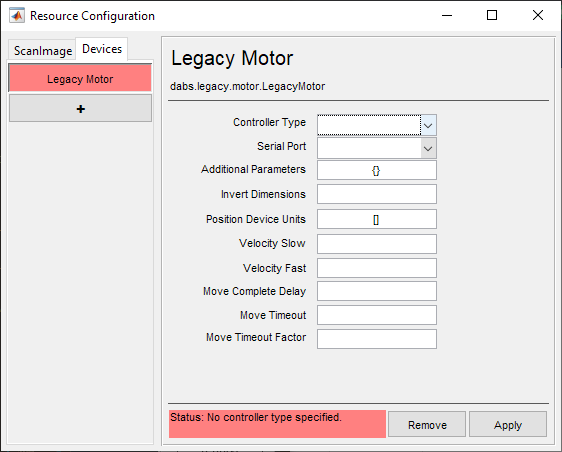
|
|
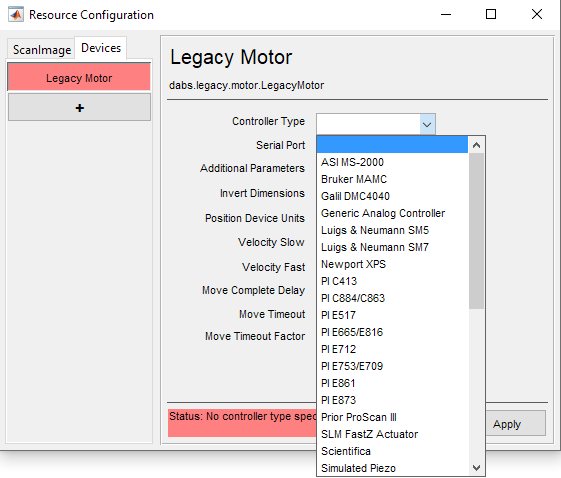
Controller Type |
Select the make and model of your legacy motor controller |
Serial Port |
Select the COM port which is connected to the controller Note The COM port can be determined by powering off and disconnecting the USB cable for the controller, and then watch the windows device manager under Ports (COM & LPT) while reconnecting and powering on the controller to see which COM Port is established. Note For some PI stages (i.e. PI C884), the USB port will not appear under Ports (COM & LPT) in the Device Manager. Instead of selecting a Serial Port, leave the Serial Port dropdown blank and connect via USB or RS-232 through the prompted PI interface. |
Additional parameters |
Some legacy motors can take additional parameters. Please the below table for a list of additional parameters by legacy motor |
Invert Dimensions |
This is a scalar/vector using 0s or 1s to represent non-inverted or inverted directionality of each dimension compared to default, respectively. |
Position Device Units |
|
Velocity Slow |
The slow travel speed velocity in position device units |
Velocity Fast |
The fast travel speed velocity in position device units |
Move Complete Delay |
The delay in —— for ScanImage® to wait before being able to initiate a new move command |
Move Timeout |
The duration of time after the start of a move when the move operation will be aborted if the stage has not yet reached its destination |
Move Timeout Factor |
Additional Parameters
Model |
Parameter |
Description |
|---|---|---|
[Model] |
[Parameter] |
[Description] |